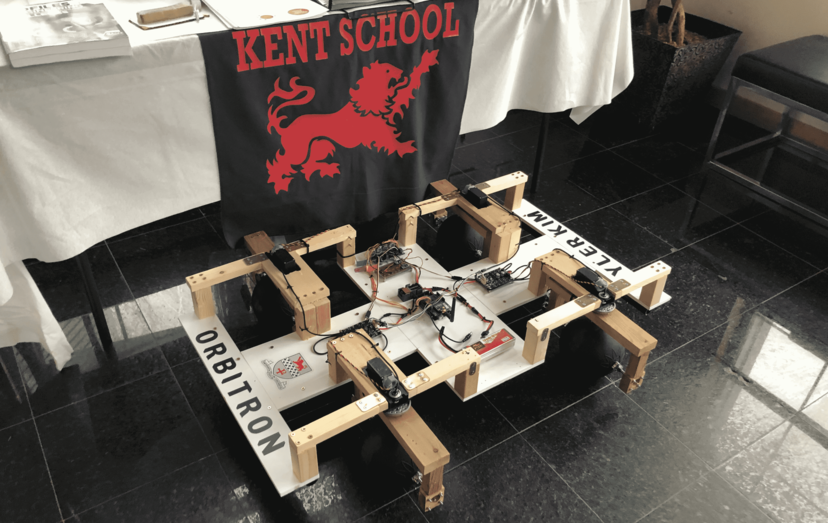
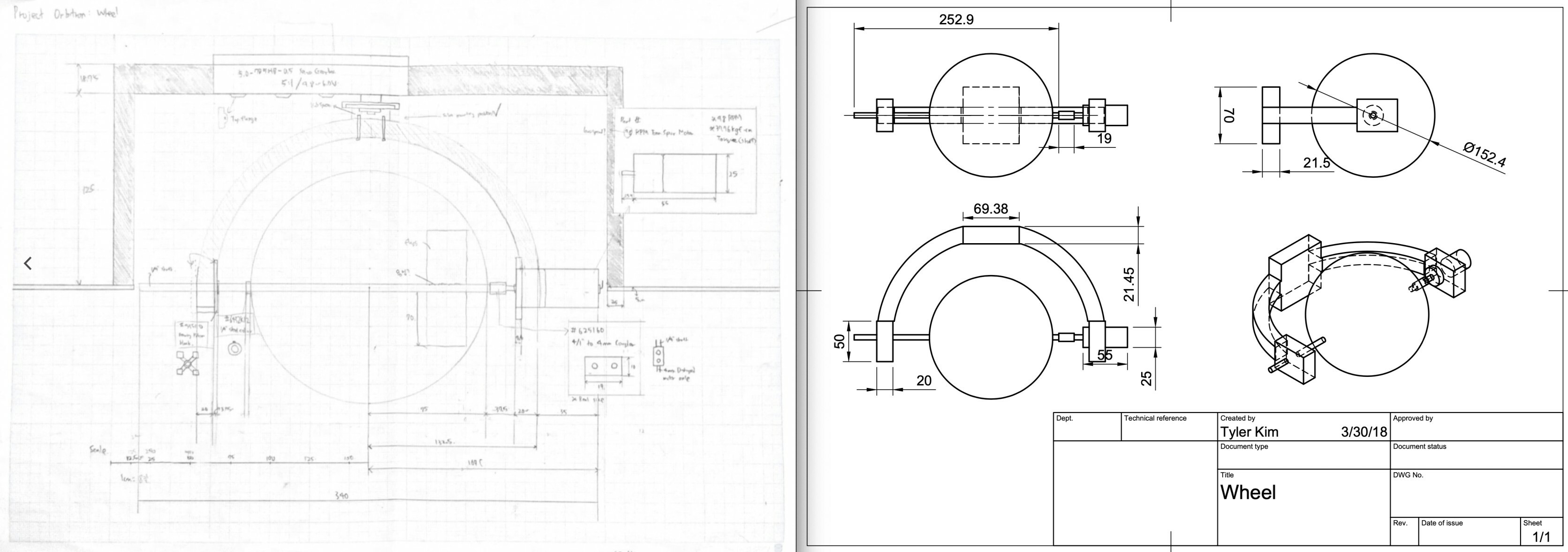
Built a vehicle with a spherical wheel that implements a 4 wheel independent steering/driving system with Arduino and C# Winform Application.
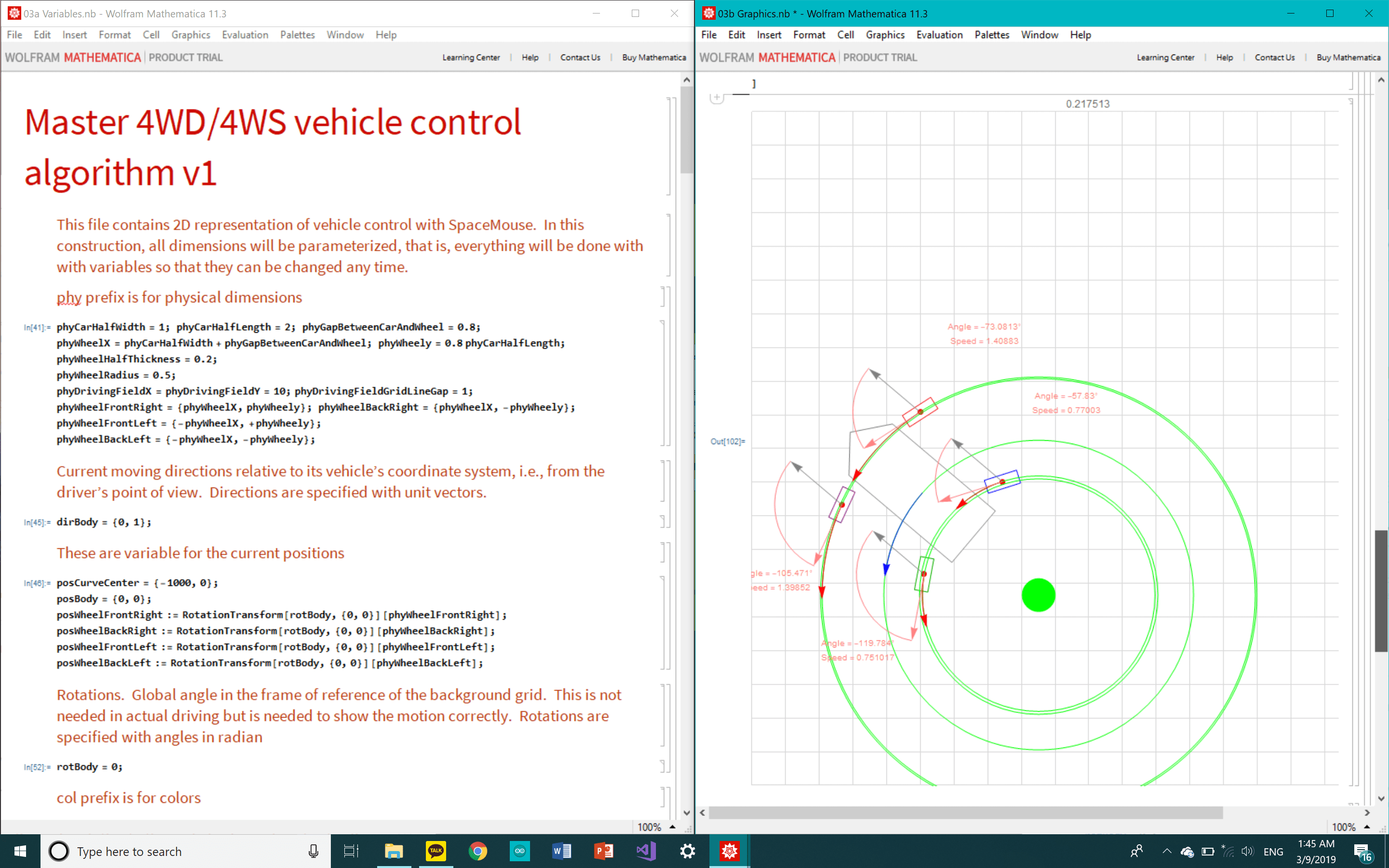
Developed a unique control algorithm in Mathematica and wrote/presented a paper in front of school body; Accepted as one of three members in Kent Guild; Won 7 awards at CT Science Fair;
- StacksArduino, Mathematica, C#
- PaperIntuitive Control Algorithm Development of 4WIS/4WID Using a SpaceMouse
- PosterConneticut Science Fair
- BlogpostOrbitron: Reinventing the (spherical) wheels and its control algorithm
- Patent“Driving System and Method of Vehicle,” [KR 10-2268833]
Media coverage
- Kent NewsA Guild Presentation by Tyler Kim
- Kent NewsAn Outstanding Performance at the 71st Annual Connecticut Science and Engineering Fair
Awards & Recognition
- FinalistLockheed Martin Physical Sciences Awards
- Senior High FinalistComputer Science Awards
- FinalistCollins Aerospace Engineering Awards
- SeniorIEEE, Connecticut Section
- RecipientRobotics And Beyond
- RecipientBarker Mohandas Awards for Transportation Research